
Spider

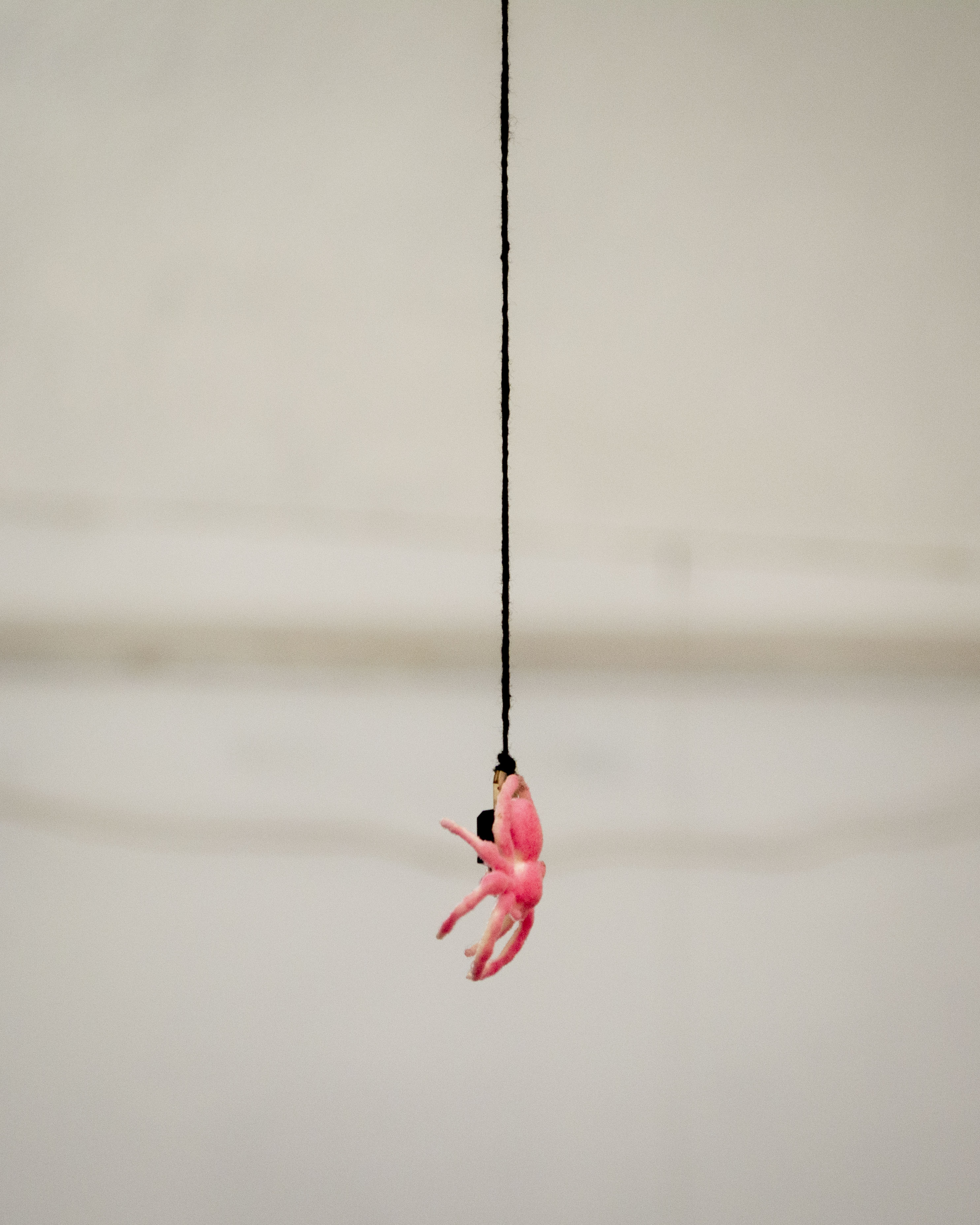

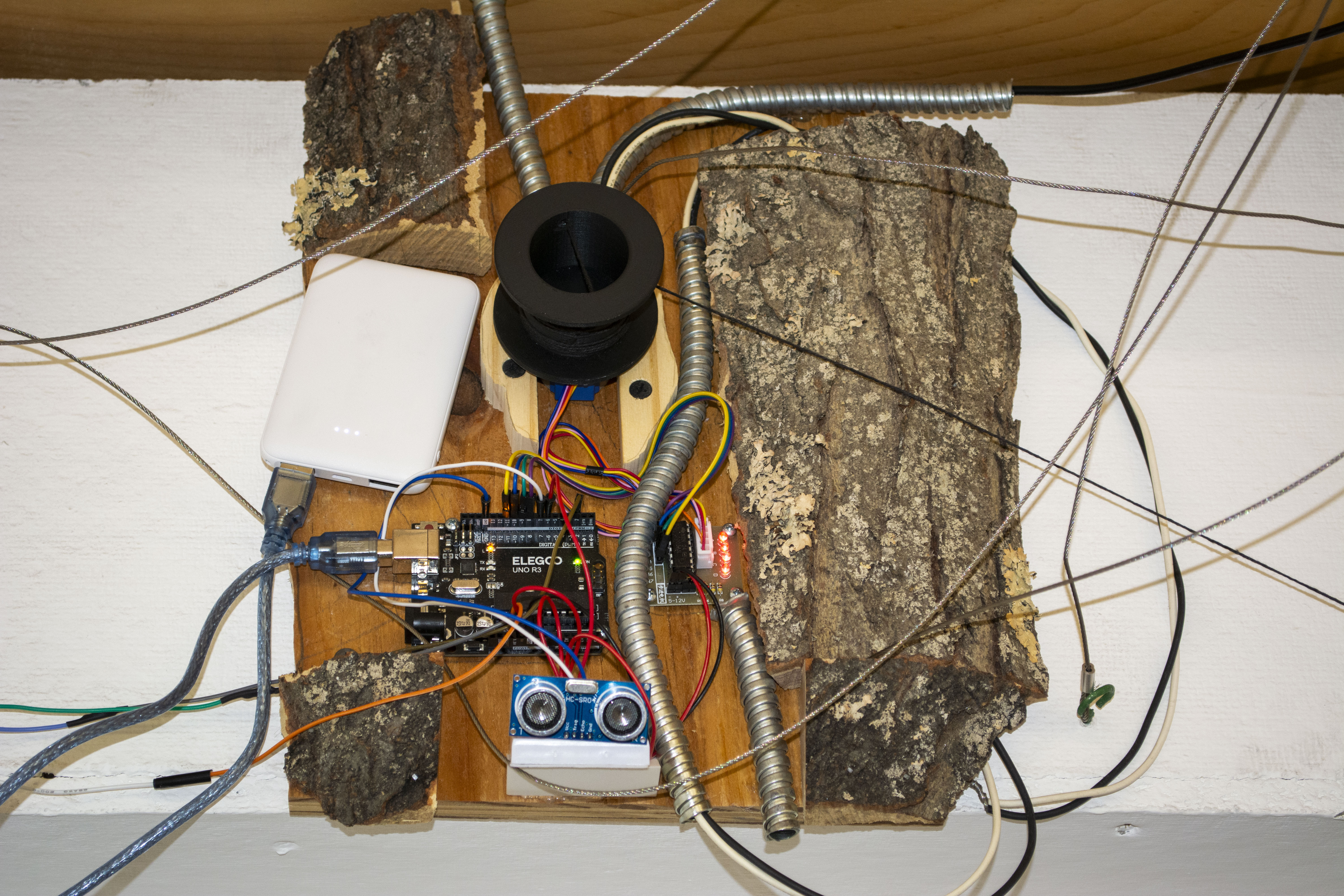


I began this piece through many coincidences. First was an insight into my frequent mention of a particular fact about spiders. Second was a comment made by my professor that the sculpture faculty door was lacking in sculpture. From these observations, I devised a spider that would descend from the faculty doorframe. When I was working on this project, I thought about what the spider represented to me. I considered my childhood and reading the story of Arachne. When I descend into weaving, I feel a bit like a spider, my whole focus on creating patterns in strings. Recently, I have been drawn to an extremely vibrant shade of pink, and so I 3D printed a small spider and flocked it in pink flocking to add both color and texture. I wanted the electronics involved to be visible but still fit in with the concept of a spider, so I created a mount for them to look like a tree trunk stuffed with components.
Tentacle

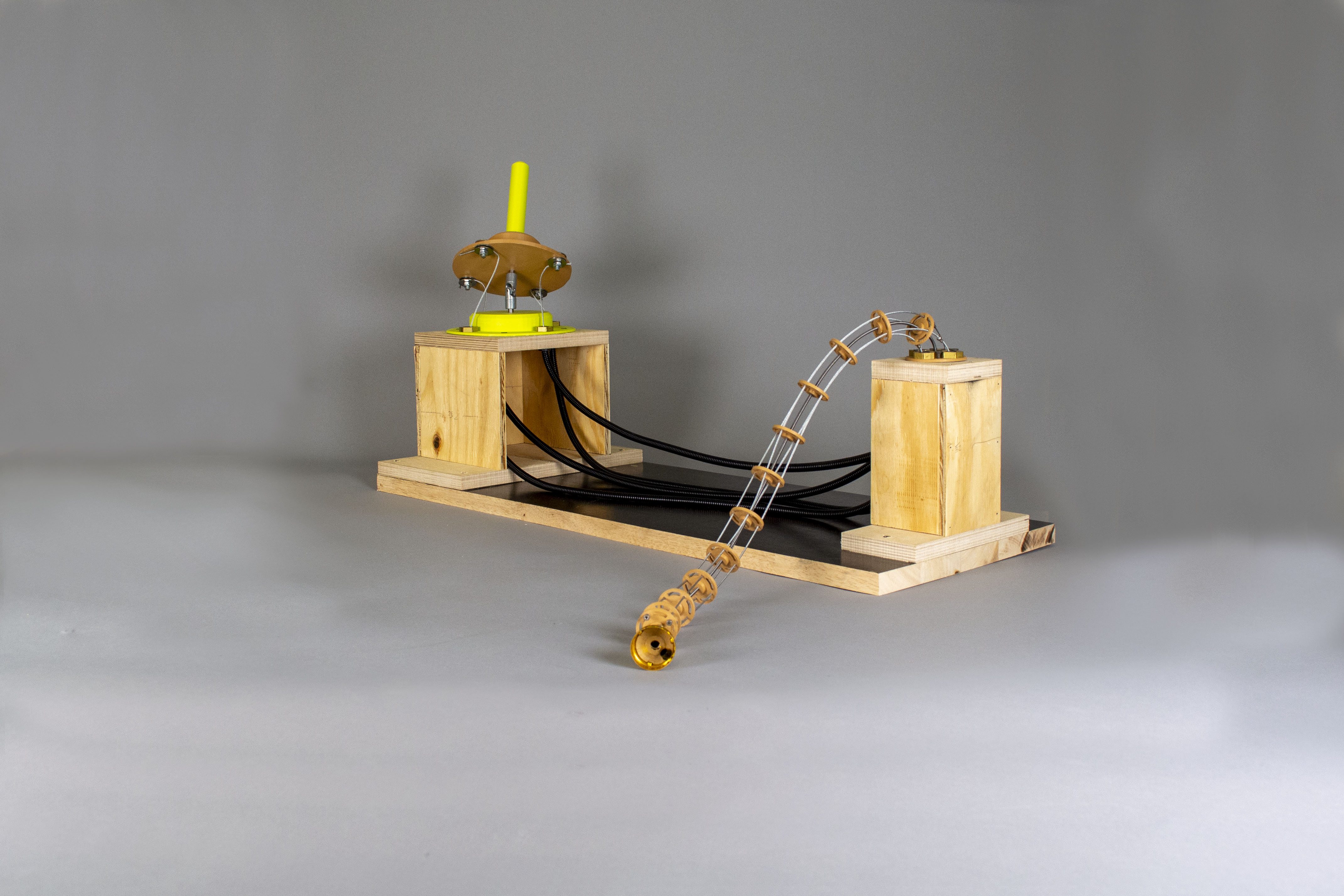
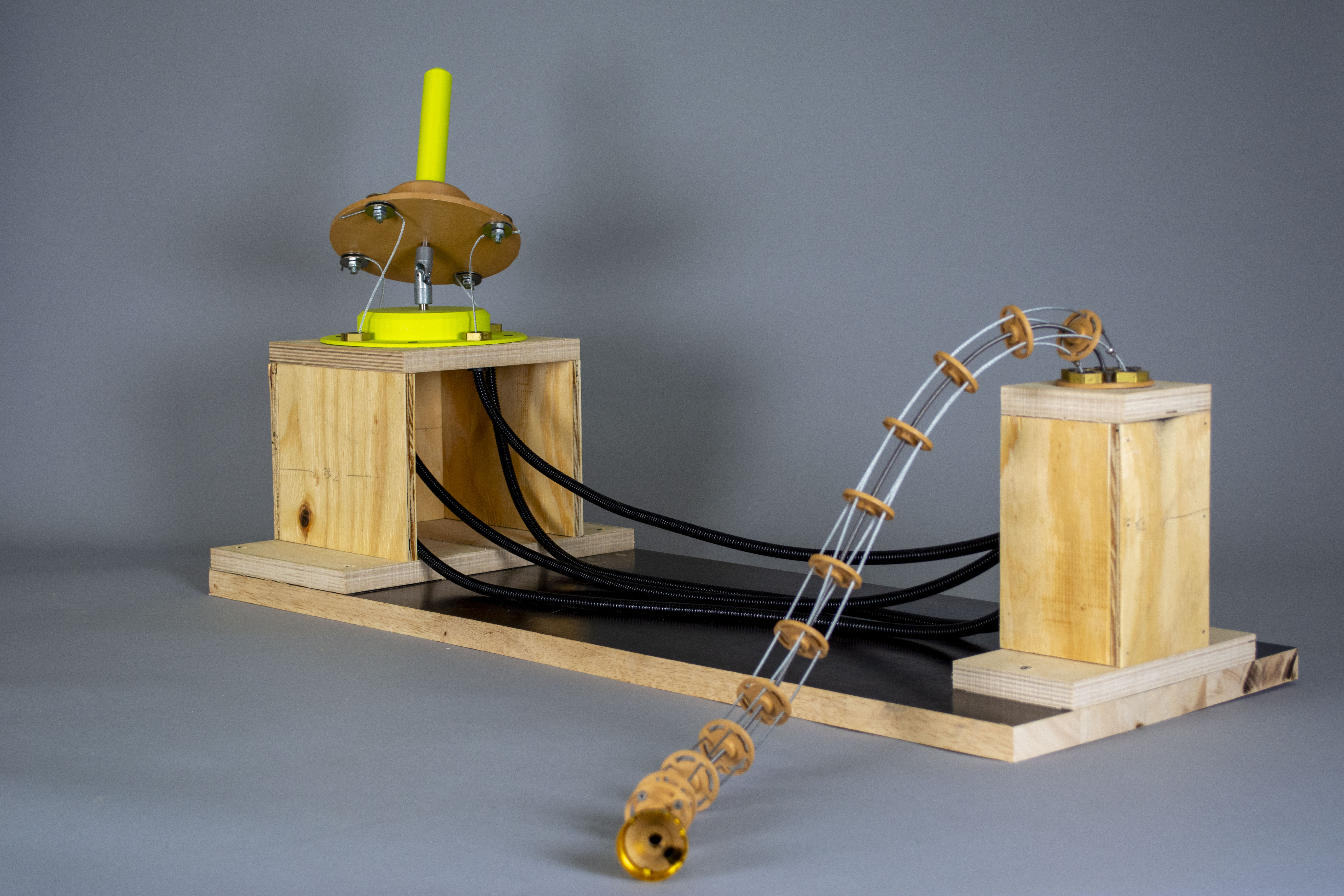
I set out to create a sculpture that was kinetic, completely mechanical, and fit within the context of my thesis project. For my thesis, I’ve been creating work that focuses on advancing technology, what we gain from industrialization vs. what we lose. All through lighting and textile-focused sculptures. For this project, I became enamored with a recent technological development in the field of robotics, specifically soft robots. Scientists and engineers have been working on this technology for a whole range of applications. The one I came across was a tentacle, designed based on a logarithmic spiral, that would allow robots to grab a variety of objects and tools better. This logarithmic spiral is found all over in nature, from octopus tentacles to chameleon tails and elephant trunks. I became interested in a movement demonstration of one of these tentacles and wanted to construct my own, rather than have a tool or something useful on the end; I wanted to add a light. I was interested in both the motion of the tentacle and the impractical, almost absurd nature of the light fixture.
To begin this project, I researched creating tentacles like this and stumbled on a wealth of animatronics guides, detailing how to build convincing tentacles that could be puppeteered. This led to another moment of inspiration, as these tentacles were controlled with a mechanical joystick, which I could encourage people looking at the work to use and try to puppeteer themselves.
For my materials, I purchased a car speedometer cable to act as the “spine” of the sculpture. It’s highly flexible, and in hindsight, I wish I had found a more rigid option. I also purchased steel wire rope, flexible tubing, and a number of other small components that would create the mechanism. The rest of the project was 3D printed. I used 12 3D printed flanges, attached to the speedometer cable with set screws, to create the guide tracks for the wire rope. Those wire ropes fed down under the sculpture and into four points on the joystick. Once placed under tension, pulling on the joystick shortened and elongated the wire rope, allowing the tentacle to move.
